کاربرد CNN در پلاک خوان هوشمند
راهنمای ساده برای فهمیدن تکنولوژی شبکه عصبی کانولوشن در سامانه پلاک خوان
در دنیای امروز، سامانههای پلاک خوان هوشمند یا سیستم پلاک خوان نقش مهمی در امنیت، نظارت ترافیک و مدیریت پارکینگها ایفا میکنند. وقتی خودرو به مقابل دوربین میآید، نرمافزار باید شماره پلاک (پلاک ماشین) را به صورت خودکار تشخیص دهد. برای این منظور، ترکیب روشهای پردازش تصویر با مدلهای هوش مصنوعی اهمیت دارد. در میان الگوریتمهای هوش مصنوعی، CNN یا شبکه عصبی کانولوشنی یکی از بهترین گزینهها برای تشخیص دقیق و سریع پلاک فارسی، حروف و ارقام پلاک ایرانی است.
در این مقاله میخواهیم ببینیم CNN چیست، چگونه در پلاک خوان خودکار به کار میرود، چه مزایا و چالشهایی دارد، و چگونه میتوان یک برنامه پلاک خوان آنلاین مبتنی بر CNN طراحی کرد. همچنین مثالهایی از پروژههای واقعی ایرانی را بررسی میکنیم تا درک مطلب آسانتر شود.
فهرست مطالب
چیستی CNN و اصول پایه
چرا از CNN در سامانه پلاک خوان استفاده میشود
مراحل استفاده از CNN در پلاک خوان
تشخیص ناحیه پلاک
پیشپردازش تصویر
جداسازی نویسه و تشخیص کاراکتر
پسپردازش
موارد ویژه پلاک ایرانی (فارسی)
چالشها و محدودیتها
پیشنهادات برای بهبود دقت و عملکرد
جمعبندی
CNN چیست و اصول پایه
CNN مخفف Convolutional Neural Network یا «شبکه عصبی کانولوشنی» است. این نوع شبکه عصبی مصنوعی (Artificial Neural Network) برای پردازش دادههایی مانند تصویر طراحی شده است.
در یک شبکه عصبی کانولوشنی، چند لایه اصلی وجود دارد:
لایه ورودی (Input Layer): تصویر خام (مثلاً رنگی یا سیاهسفید) را به شبکه میدهد.
لایه کانولوشن (Convolutional Layer): فیلترهای کوچک (مثلاً ۳×۳) در سراسر تصویر حرکت میکنند و ویژگیهای محلی مانند لبه، بافت یا تغییر شدت نوری را استخراج میکنند (ضرب ماتریسی).
لایه فعالسازی (Activation): معمولاً از ReLU استفاده میشود تا ویژگیهای منفی حذف شوند (ReLU(x) = max(0, x)).
لایه پولینگ (Pooling): برای کاهش ابعاد نقشههای ویژگی و کاهش محاسبات، از عملیات Max Pooling یا Average Pooling استفاده میشود.
لایههای میانی بیشتر: ترکیبی از کانولوشن + فعالسازی + پولینگ تا ویژگیهای پیچیدهتر یاد گرفته شود.
لایه تختسازی (Flatten): وقتی ویژگیها به سطح مناسب رسیدند، به یک بردار تبدیل میشوند.
لایه متصل (Fully Connected): مشابه شبکههای عصبی سنتی، این لایه خروجی نهایی را تولید میکند (مثلاً تعداد کلاسها برابر تعداد حروف و اعداد یا برچسب “پلاک ندارد” یا “پلاک دارد”).
در عمل، در سامانه پلاک خوان نیازی نیست که همه تصویر خودرو مستقیماً به CNN برود؛ بلکه معمولاً ابتدا ناحیه پلاک شناسایی و جدا میشود، سپس CNN روی آن ناحیه اعمال میگردد.
چرا CNN در سامانه پلاک خوان؟
چند دلیل اصلی وجود دارد که باعث میشود استفاده از CNN در پلاک خوان هوشمند رایج شود:
بردار ویژگی خودکار: به جای استخراج ویژگی دستی (مثلاً تشخیص لبه، بافت و غیره)، CNN خود به صورت خودکار ویژگیها را یاد میگیرد.
مقاومت به تغییرات نور و زاویه: CNNها معمولاً نسبت به تغییرات در روشنایی، نویز یا زاویه دید مقاومت بیشتری دارند.
دقت بالا در تشخیص نویسه: وقتی تصویر پلاک آماده باشد، CNN میتواند با دقت بالا کاراکترهای فارسی را تشخیص دهد (در پروژههایی مانند Deep Learning Based Framework for Iranian License Plate Recognition که از دو CNN برای تشخیص پلاک و خواندن نویسهها استفاده شده است) پروژه قدیمی است اما برای مطالعه بروز ترین پروژه فارسی در ایران تا کنون ‚پلاک خوان هوشمند بنو را مطالعه کنید.
سرعت مناسب در پردازش آنلاین: مدلهای بهینه شده مانند YOLO یا Faster R-CNN میتوانند در لحظه (Real-Time) کار کنند و برای سیستم پلاک خوان آنلاین مناسب باشند.
در مجموع، ترکیب پلاک خوان + CNN باعث میشود سامانه دقیقتر، سریعتر و قابل اعتمادتر شود.

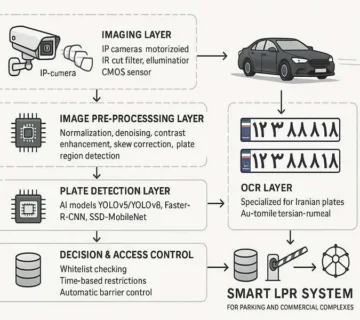
مراحل کاربرد CNN در پلاک خوان
برای استفاده از CNN در پلاک خوان، باید چند مرحله پشت سر هم انجام شود:
1. تشخیص ناحیه پلاک
ابتدا لازم است در تصویر خودرو یا صحنه شهری، ناحیه پلاک خودرو شناسایی شود (Region Detection). این کار معمولاً با مدلهای تشخیص شیء (Object Detection) انجام میشود، به عنوان مثال YOLO، SSD یا Faster R-CNN. یک مدل CNN یا ترکیبی از CNNها تشخیص میدهد که در آن بخش تصویر پلاک قرار دارد.
مثال: در یک پروژه ایرانی، از یک CNN مثل YOLOv3 استفاده کردند تا پلاک را در تصویر تشخیص دهند و سپس از یک مدل دوم (Faster R-CNN) برای تشخیص کاراکترها بهره بردند.
پس از تعیین کادر پلاک، آن کادر برش میخورد تا فقط ناحیه پلاک به مراحل بعدی منتقل شود.
2. پیشپردازش تصویر
حال که ناحیه پلاک به دست آمد، باید تصویر آن را به شکلی آماده کنیم که تشخیص کاراکترها دقیقتر شود:
تبدیل به تصویر خاکستری (Grayscale)
افزایش کنتراست و بهبود روشنایی (Contrast Enhancement)
نویزگیری (Noise Reduction)
تصحیح زاویه (Perspective Correction) در صورتی که پلاک مایل گرفته شده باشد
باینری کردن تصویر (Thresholding)
استفاده از مورفولوژی برای بهبود جداسازی کاراکترها
این مراحل باعث میشود ورودی CNN برای تشخیص کاراکترها دقیقتر شود.
3. جداسازی نویسه (Character Segmentation)
در این مرحله، حروف و اعداد پلاک به اجزای جداگانه تقسیم میشوند. هر حرف یا عدد به صورت تصویر کوچک مستقل درمیآید. میتوان از الگوریتمهایی مانند Connected Components یا Projection Profile برای این کار بهره برد.
بعد از جداسازی، هر نویسه مستقل به مدل CNN برای تشخیص داده میشود.
4. تشخیص کاراکتر با CNN
این مرحله قلب سامانه است. مدل CNN با دیدن تصویر کوچک هر نویسه، تعیین میکند که آن نویسه کدام حرف یا عدد است (مثلاً “۱”، “الف”، “پ”، “۳۲۴” و غیره).
برای تشخیص بهتر، ممکن است از مدل CNN همراه با لایههای اضافی یا معماری خاص استفاده شود.
5. پسپردازش
پس از اینکه CNN تشخیص داد هر نویسه چه چیزی است، باید نتیجه نهایی پلاک را بسازد. در این مرحله:
نویسهها به ترتیب در کنار هم قرار میگیرند
اگر خطایی در تشخیص باشد، با الگوریتم تصحیح خطا (مثلاً جدول کاراکترهای مجاز در پلاک ایران) اصلاح میشود
ممکن است دادهای از پایگاه داده موجود باشد تا پلاک معتبر تشخیص داده شود
به این ترتیب، سیستم پلاک خوان هوشمند عدد پلاک را به صورت رشته نهایی میدهد.
موارد ویژه پلاک ایرانی (فارسی)
وقتی با پلاک ایرانی روبهرو باشیم، چالشهای خاصی وجود دارد:
حروف و اعداد فارسی: نویسههایی مثل «الف»، «پ»، «ت» یا اعداد فارسی که شکلشان تفاوت دارد با اعداد لاتین.
فونت متنوع: پلاک ماشین ممکن است فونتهای مختلف داشته باشد.
ترکیبات نویسهها: ترکیب حرف و عدد در پلاک ایرانی پیچیده است و باید مدل توانایی تشخیص همه ترکیبها را داشته باشد.
نور کم شب: در شب یا شرایط نور ضعیف، تشخیص دقیق دشوارتر است. دوربین پلاک خوان باید مجهز به مادون قرمز یا نور کمکی باشد تا تصویر با کیفیت بگیرد.
زاویه و انحراف پلاک: پلاک ممکن است مایل یا کمی کج در تصویر باشد؛ تصحیح پرسپکتیو اهمیت بیشتری دارد.
نویز و شرایط محیطی: گردوخاک، سایهها، انعکاسها و شرایط محیطی دیگر به مدل فشار میآورد.
در پروژهی قدیمی ایرانی گفته شده، دو CNN پشت سر هم به کار رفتهاند: اول برای تشخیص موقعیت پلاک و دوم برای تشخیص نویسهها در داخل پلاک. این روش توانسته دقت بسیار بالا و سرعت مناسب را فراهم کند.

چالشها و محدودیتها
اگرچه ترکیب پلاک خوان هوشمند و CNN امکانات زیادی دارد، برخی چالشها به چشم میآیند:
نیاز به دیتاست بزرگ: برای آموزش مناسب CNN، دادههای زیادی از پلاکها و نویسهها نیاز است. بدون دیتاست کافی، مدل ممکن است overfit شود یا نتواند به خوبی عمومیسازی کند.
شرایط نامساعد محیطی: نور ضعیف، سایه، باران، گرد و غبار یا حرکت سریع خودرو ممکن است دقت را پایین بیاورد.
تغییر فونت و طراحی پلاک: اگر پلاک در آینده طراحی متفاوتی پیدا کند، مدل باید دوباره آموزش ببیند.
محاسبه سنگین: اگر مدل بزرگ باشد، پردازش لحظهای ممکن است کند شود؛ بهینهسازی و مدل سبک مورد نیاز است.
کار در شب و نور کم: نیاز به دوربینهای مخصوص یا نور کمکی برای گرفتن تصویر مناسب در شب.
محدودیت پردازش در دستگاههای کمقدرت: اگر بخواهیم سیستم را روی دستگاههای کوچک یا دوربین تعبیه شده اجرا کنیم، محدودیت منابع مطرح میشود.
پیشنهادات برای بهبود دقت و عملکرد
برای دستیابی به عملکرد بهتر در سیستم پلاک خوان مبتنی بر CNN پلاک خوان، اقدامات زیر مفیدند:
استفاده از داده افزوده (Data Augmentation): چرخش کوچک، تغییر روشنایی، اعمال نویز و بزرگنمایی میتواند کمک کند که مدل به شرایط متنوع عادت کند.
انتخاب معماری مناسب: مدلهای سبک مثل MobileNet، EfficientNet یا نسخه کوچکشده از ResNet برای محیطهای محدود بهتر هستند.
فاز آموزش تدریجی: ابتدا فقط لایههای آخر را آموزش بدهیم، سپس کل مدل را فاینتیون کنیم.
افزودن لایههای Dropout و تنظیمکننده (Regularization): برای جلوگیری از کم برازش (Underfiting).
استفاده از تکنیکهای انتقال یادگیری (Transfer Learning): مدل از پیش آموزشدیده روی دیتاست بزرگ ImageNet را به کار برده و در ادامه برای داده پلاکهای ایرانی فاینتیون کنیم.
بهبود پیشپردازش: تصحیح زاویه قوی، فیلترهای نویز پیشرفته و تنظیم رنگ ویژه میتواند دقت را بالا ببرد.
انطباق مدل با شرایط خاص شب: ترکیب CNN با الگوریتمهای تقویت تصویر یا استفاده از تصاویر مادون قرمز.
ارزیابی مداوم و بهروزرسانی: پس از راهاندازی سیستم پلاک خوان، بازخوردهای خطا را جمعآوری و مدل را مجدداً آموزش بدهیم.
جمعبندی
در این مقاله یاد گرفتیم که چگونه CNN (شبکه عصبی کانولوشنی) در پلاک خوان هوشمند به کار میرود. ابتدا دانستیم CNN چیست و چه اجزایی دارد، سپس مراحل عملی پلاک خوان مبتنی بر CNN شامل تشخیص ناحیه پلاک، پیشپردازش تصویر، جداسازی نویسه، تشخیص کاراکتر و پسپردازش را مرور کردیم. سپس به ویژگیهای خاص پلاک ایرانی، چالشها و راهکارهای بهبود سیستم اشاره کردیم.
در همین راستا، ما محصول اختصاصی خود یعنی پلاک خوان هوشمند بنو را توسعه دادهایم. این سیستم با بهرهگیری از جدیدترین الگوریتمهای هوش مصنوعی و یادگیری عمیق، قادر است پلاک خودروها را در کمترین زمان و با بالاترین دقت شناسایی کند. اگر به دنبال راهکاری مطمئن برای مدیریت پارکینگ، نظارت شهری یا اتوماسیون ترافیک هستید، پلاک خوان هوشمند بنو میتواند بهترین انتخاب برای شما باشد.

{kind=link}
بدون دیدگاه